
Döner kanatlı İnsansız Hava Araçlarının uçuşu ne yazık ki sanılanın aksine dört pervanenin aşağı yönlü bir itiş kuvveti oluşturması kadar basit bir şekilde açıklanamaz. Böyle bir aletin devrilmeden sadece havada dengede asılı kalabilmesi için bile üstesinden gelinmesi gereken birçok zorluk bulunmaktadır. Bu yazıda, sistemlerin otomatik kontrolünde oldukça yaygın olarak kullanılan PID kontrolcülerin nasıl çalıştığına ilişkin bir giriş yapılacak ve P değerinin nasıl çalıştığı ile alakalı bilgiler verilecektir.
Girişte bahsedildiği üzere, İnsansız Hava Araçlarını havada iken dengede tutmak oldukça karmaşık bir kontrol algoritması ile mümkündür. Olayı biraz basitleştirilmiş bir şekilde anlatmaya çalışalım. Örneğin, aracımız dört değil, iki pervane-motor çiftli düzlemsel bir araç olsun.
Şimdi, bu aracın düz bir şekilde havaya kalkması için ne gerekli? İki motor ve pervanesi aynı hızda dönse yeter, değil mi? Bu sorunun cevabı hem evet, hem hayır. Birincisi, bu iki motor aynı hızda dönse bile her pervanenin birebir aynı olduğunu söylemek çok zor. Pervanelerdeki bu ufak fark bile tüm araçta bir moment oluşturup aracın devrilmesine sebep olabilir. İkincisi, pervaneler aynı olsa bile tüm motorları aynı hızda döndürmek de öyle kolay bir iş değil. Motorların dönüş hızındaki çok ufak bir farklılık ya da hızlanmadaki çok kısa bir gecikme, pervanelerdeki farklılıktan daha fazla bir şekilde oluşan momenti etkilemektedir. Bunun sebebi, bir pervanenin itiş kuvvetinin, pervanenin dönüş hızının karesi ile doğru orantılı olmasıdır.
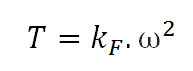
Burada ω pervanenin dönüş hızı, kF ise pervanenin boyutu, yüzey alanı, hatvesi, hava yoğunluğuna bağlı parametrelerden oluşan bir sabittir.
Örneğin, EMAX RS2205 motoru ve 45 cm’lik bir İHA için, bir motor saniyede 229, diğeri ise saniyede 230 tur dönsün. Bu durumda cihazımız 10 saniyede üç takla atmış olurdu bile:
Bu davranışı kontrol altında için kullanılan en bilinen yöntem PID Kontrolcülerdir. PID kontrolcülerin çalışma mantığını şöyle düşünebiliriz: Diyelim ki cihazımız yavaş yavaş yan yatmaya başlıyor ve biz bunu görüyoruz; bu durumda doğal olarak yapacağımız şey, yatma yönünün tersindeki motoru daha hızlı döndürüp cihazı dengelemeye çalışmak olurdu. Cihaz ne kadar hızlı yatma eğilimde olursa biz de karşı yönlü motorun dönüş hızını o kadar hızlı artırırdık ki zamanında müdahale edelim ve denge bozulmasına engel olalım. Peki bunu bir bilgisayara, mikroişlemciye nasıl yaptırabiliriz? İşte, bunun cevabı PID Kontrolcüler. Düşünce deneyimize devam edelim. Cihazın açısını sık sık, diyelim ki 1 ms’de bir kontrol etseydik, ve cihazın yatış açısına orantılı olarak bir motorun hızını artırıp diğerini azaltsaydık nasıl olurdu? İşte buna P kontrolcü denmektedir:
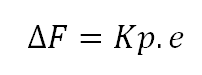
Burada Kp bizim tarafımızdan seçilen pozitif bir sabit ve ise ilgili motorda artacak veya azalacak itme kuvvetidir. e ise aracın olmasını istediğimiz açı ile asıl açısı arasındaki farktır, yani hatadır. Bu hata aşağıdaki şekilde daha iyi anlaşılabilir.
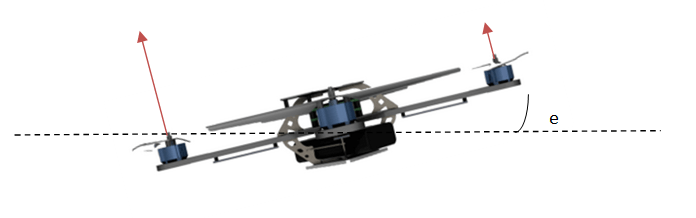
Diyelim ki aracın düz durmasını istiyoruz. Öyle ise istenen hata 0 derece olurdu.Yukarıdaki örnekteki gibi bir anda cihazın ufuk çizgisiyle arasında 10 derecelik bir açı farkı olduğunu düşünelim. Bu durumda aracın motorlarına uygulanacak kuvvet:
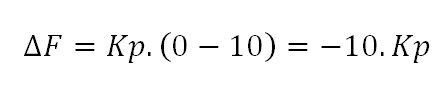
olurdu. Dikey eksende sabit kalıp dengelenme hareketinin sağlanabilmesi için motorların birindeki itiş kuvveti kadar artarken diğerindeki kuvvet kadar azalmalıdır. Yukarıdaki durum için soldaki motorun kuvveti artmalı sağdaki ise azalmalıdır. Eğer istenen açı ile aracın açısı aynı ise ilave kuvvetin, yani ‘in sıfır olacağına dikkat edelim. Böylelikle cihaz zaten dengede olduğu için motor kuvvetlerinde bir değişiklik yapılmasına gerek kalmaz.
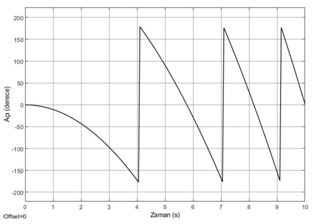
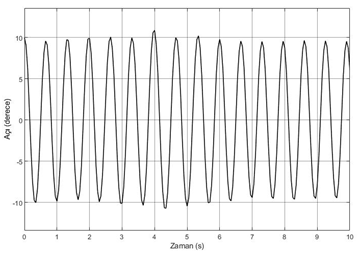
Buraya kadar gayet mantıklı görünüyor. Fakat ortada ilk bakışta görünmeyen bir sorun var. Bunun için şöyle bir örnek verelim. Bir bisikletin pedallarını çeviriyorsunuz, fakat sonra aniden ayağınızı pedaldan çektiniz. Bisiklet aniden durur muydu? Benzer bir sorun şu an aracımızda da mevcut. Her ne kadar açılar eşitlenince iki motor arasındaki kuvvet farkını sıfıra çeksek de kitlesel atalet sebebiyle araç bir süre daha dönmeye devam eder ve sıfır yani denge noktasını geçer; daha sonra tekrar dengelemek için tersi yönde motorlarının gücünü artırır fakat bu sefer de tekrar ters yönde sıfır noktasını geçer. Bu süreç böyle devam eder ve araç örnek olarak 10 derece ve -10 derece arasında salınım yapmaya devam eder. Herhangi bir önlem alınmazsa, teorik olarak bu salınım genliğini koruyarak sonsuza kadar devam edebilir. Aşağıda durumu özetleyen grafik verilmiştir.
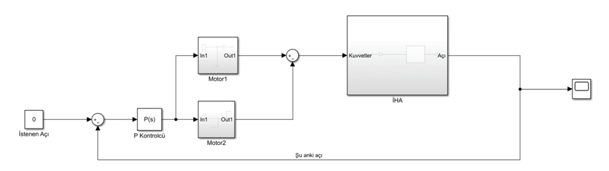
Otomatik kontrol teorisine göre, şu anda tasarladığımız sistemin blok diyagramı aşağıdaki gibidir:
Şu anki örnekte mevcut salınım sorununu çözebilmek için ihtiyacımız olan şey P kontrolcüye ek olarak bir D kontrolcünün sisteme eklenmesidir. D kontrolcülerinin çalışma mantığını da bir sonraki yazıda ele alacağız. Yazıyı bitirmeden önce bütün İnsansız Hava Araçlarındaki kontrol yazılımlarında mevcut olan PID kontrolcülerin aynı olmadığını ve birbirinden farklı bir şekilde performans gösterebildiklerini not edelim. Söz konusu kontrolcülerin performansları arasındaki farkı etkileyen faktörler yapılan geri beslemeler (açı yerine açısal hız geri beslemesi gibi), kullanılan kontrolcü sayısı, kontrolcülerin tipleri tipi, kullanılan filtreler gibi etkenlerdir.